
Menu
Cynefin has always gone through mutations over time, sometimes the changes are visually significant, sometimes linguistically. One of the things which has taxed me over the years is to find ways to describe how things move between domains. For some years we used the tetrahedron models that were one of Cynthia’s contributions when we were working together. They demonstrated four models for each of the main domains (shown bottom right).
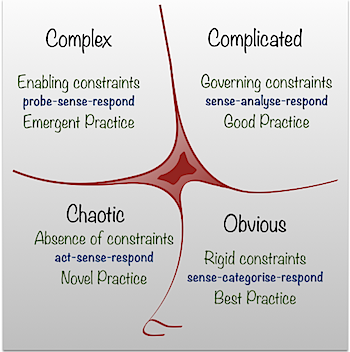
In practice one had to explain that it was not a hierarchy per say but an indication of network connectivity. Sometimes I experimented with different visuals, but I ended up going back to the tetrahedrons. 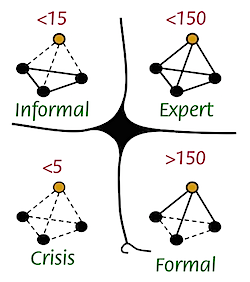 It worked and I still use them from time to time. But I then started to think about the nature of constraints following several conversations with Alicia Juarerro and also coupling. it didn’t happen overnight but I got to the point where the distinction between governing and enabling constraints became more useful, especially with the metaphor of the difference between an endoskeleton and an exoskeleton. The external constraint of an insect’s skeleton bounds its nature, while the endoskeleton of a mammal allows for significant variation around a coherence centre. From there it was a small step to talk about fixed constraints in the Obvious domain and the absence of constraints (or as importantly connections) in Chaos. That also allowed a arc of different levels of coupling that I’ll come back to in a subsequent post.
It worked and I still use them from time to time. But I then started to think about the nature of constraints following several conversations with Alicia Juarerro and also coupling. it didn’t happen overnight but I got to the point where the distinction between governing and enabling constraints became more useful, especially with the metaphor of the difference between an endoskeleton and an exoskeleton. The external constraint of an insect’s skeleton bounds its nature, while the endoskeleton of a mammal allows for significant variation around a coherence centre. From there it was a small step to talk about fixed constraints in the Obvious domain and the absence of constraints (or as importantly connections) in Chaos. That also allowed a arc of different levels of coupling that I’ll come back to in a subsequent post.
That metaphor also made the shift between complex and complicated more of a phase shift, less of a gradient and that works as well. Once I had that I started to use it in presentations, then shifted back into using it to describe Dynamics. That also produced the new Grazing dynamic (shown as purple in the opening.
Tomorrow I’ll talk about the dynamics and how they can be better described in terms of constraints and how that produces a more readily understood way of taking about strategy and also monitoring.



Cognitive Edge Ltd. & Cognitive Edge Pte. trading as The Cynefin Company and The Cynefin Centre.
© COPYRIGHT 2024
The essence of my post yesterday was to suggest that much of Nudge Theory ...
In yesterday’s post I looked at my decision to use constraints in the definition ...